基于激光三角法测量物体位移演示实验系统的研制
 学生演示实验测量系统,该装置采用线阵CCD作为光探测器,具有人机交互友好、结构设计简单以及易于演示观察等优点,能够实现对物体位移进行快速准确的演示测量。
学生演示实验测量系统,该装置采用线阵CCD作为光探测器,具有人机交互友好、结构设计简单以及易于演示观察等优点,能够实现对物体位移进行快速准确的演示测量。
关键词:激光三角法;位移测量;演示实验
一、引言
随着科学技术的不断发展,光电技术的应用范围也越来越广泛,其中激光三角法作为光电技术的重要研究领域,与传统位移测量方法相比,具有测量精度高、误差小、操作简单稳定等优点,因而在微位移测量方面得到了普遍应用。据此研制了基于激光三角法测量物体位移演示实验系统,演示能够实现系统的整体组装设计和位移测量结果的实时显示。通过该系统,中学生可了解线阵CCD探测器工作原理及利用实验设备进行验证性实验等。
二、激光三角法测量原理与实验装置
激光三角法按测量原理的不同可分为直射式激光三角法和斜射式激光三角法,其中直射式三角法相比较斜射式激光三角法具有几何算法简单、安装调试方便的特点,因此本系统最终采用直射式激光三角法的设计方案。
直射式激光三角法属于主动视觉测量方法,当物体发生位移时,激光器投射到物体上面的光斑也会随之发生移动,因而导致光斑漫发射到CCD探测器上的像光斑产生位移,由此可以进行标定,得到标定曲线,从而确定物体移动距离与所成像位移之间的关系。直射式激光三角法工作原理图如图1所示。
在实际设计几何光路时,为尽可能减小误差,需要在CCD探测器上得到一个清晰的像。当测量光路满足Scheimpflug条件时,可在CCD探测器上得到一个清晰的像。
根据高斯成像公式以及几何光学关系可得出物体位移与线阵CCD探测器接收光斑位移之间的关系为:
实验系统主要有激光器、水平位移平台及控制系统、CCD信号采集系统和计算机显示。系统要求激光器产生的光斑亮度高,光斑小。半导体激光器实物图以及光斑图像如图2所示。
演示装置整体结构如图3所示,通过运动控制器控制步进电機的转动,从而使水平位移平台发生移动,从运动控制器上可得到移动的位移。图4为位移平台控制界面。
三、实验数据处理
信号采集得到的是线阵CCD上像素的灰度值,并不能直接得到光斑中心位置,需对数据进行预处理。由于噪声信号与有用信号同时存在,采集到的图像中会包含噪声,则需先处理噪声问题。在经过滤波降噪处理后的图像是一条散点连成的曲线,需要进行光斑定位分析,最终得到的光斑位置才是需要的结果。
针对本系统中有用信号主要为低频信号或比较平稳的信号,而噪声主要是高频信号,则可采用加低通滤波器的方法来滤去高频噪声。对于基于激光三角法物体位移测量而言,噪声信号主要为高斯噪声,而采用均值滤波能够很好地抑制高斯噪声。因此系统最终采用先进行均值滤波,然后再使用Butterworth滤波器滤波的方案,滤波前后波形对比如图5所示。
光斑定位方法主要包含质心法以及二值化法,二值化法是一种先将灰度图像转化为二值图像、然后采取后续处理的简便计算方法。由于二值化法与质心法相比较具有原理简单、信号处理迅速以及可实时测量等优点,因此本系统采用二值化法进行光斑中心定位。
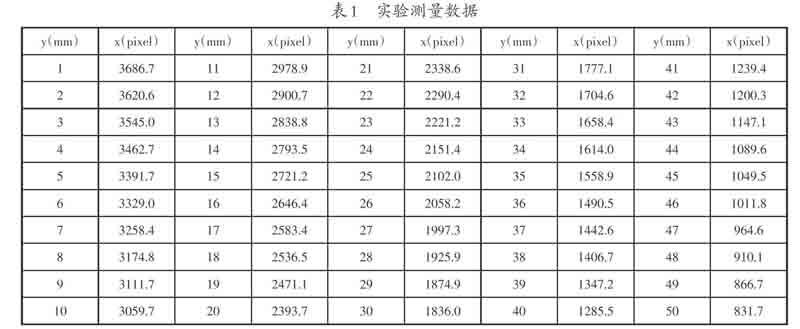
CCD采集得到的信号经过滤波以及光斑中心定位处理后即可得到实验测量数据见表1,物体位移与CCD像素之间的散点图如图6(a)所示。
对测得的y与x之间的关系进行了二次拟合,最终得到的拟合曲线和拟合式分别为图6(b)和式(2)所示。
确定系数为0.9999和校正确定系数为0.9999均接近于1,说明模型对数据拟合很好。从实验结果可以看出,线阵CCD在靠近边缘的位置会出现较大的非线性,而在中心区域具有很好的线性输出关系。
四、结束语
本文对激光三角法测位移工作原理、图像滤波以及光斑中心定位原理进行了研究,在此基础上研制开发了基于激光三角法的物体位移测量装置.该实验装置围绕线阵CCD能够完成验证性、设计性等多方面实验内容。利用该装置进行了实验数据测量,测量结果线性度好、灵敏度高、可重复性好,能够实现对物体位移的非接触性测量。
栏目最新:
- 2023年小学教师政治学习心得体会(汇总16...2024-01-06
- 全国交通安全日宣传活动方案(优秀8篇)2024-01-06
- 最新农村自建房买卖合同协议书(模板8篇)...2024-01-06
- 2023年度农村集体协议书(实用8篇)(完整)2024-01-06
- 2023年小学教务处年度工作总结(19篇)【...2024-01-06
- 管理年度总结(大全12篇)2024-01-06
- 个人总结教师评职称(优质19篇)(2023年)2024-01-06
- 2023年度作业没写完检讨书(汇总16篇)【...2024-01-06
- 述责述廉报告完整版(模板9篇)(范文推荐)2024-01-06
- 2023年最新羊年拜年祝福语(优秀8篇)【完...2024-01-05